レーザポインタを用いた移動カメラの障害物回避
概要
自律型移動ロボットは環境を認識するためにセンサの役割が重要になります.
その中でも,視覚センサ(カメラ)から環境の3次元情報を得ることは有用です.
しかし,カメラ画像には奥行き情報がありません.
これを解決するためには様々な方法があります.
●複数台のカメラを用いる
・互いの位置関係を把握して視差から求める
・広範な対象に可能
●他のセンサを用いる
・LRFなどの距離センサから求める
・計算量が少ない,精度がよい
一般的に高い精度の3次元情報を要求すると,
ロボットが大型になり計算量が増えるため動作が遅くなります.
そこで,本研究では小型・高速移動をする自律型ロボットの作成を目的とします.
移動車体にレーザポインタとカメラを搭載し,
カメラ画像上のポインタ光から障害物の有無を検知します.
システム構成
以下にシステムの概要を示します.
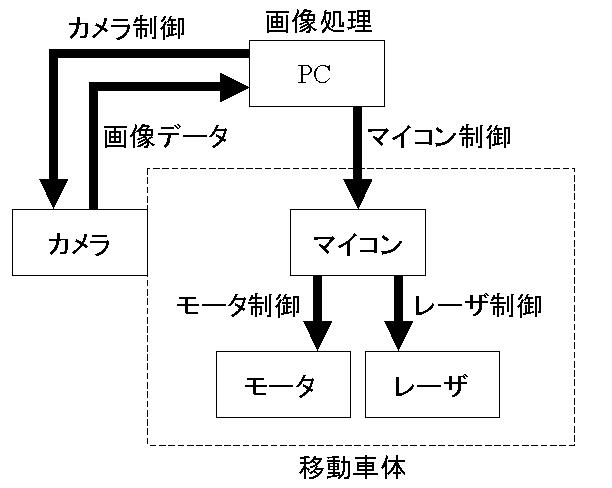
カメラから画像データをPCに取り込みます.
PCでは画像処理をし,その結果からマイコンとカメラのパンを制御します.
マイコンはモータとレーザを制御します.モータは移動車体を動かします.
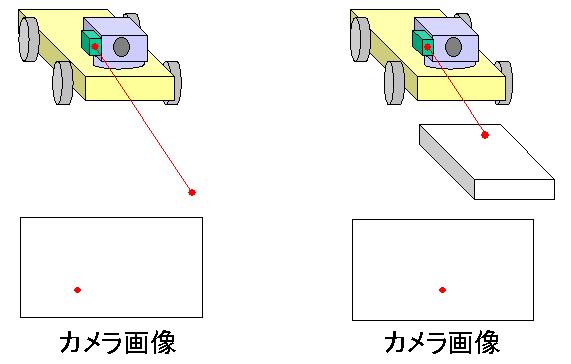
障害物の判定
レーザポインタのポイント光がカメラ画像上の床を指すように設置します.
ポイント光の検出には背景差分法を用います.
障害物がない場合は常に同じ位置にポイント光があり,
障害物がある場合はポイント光が移動します.