1.基本動作
本システムは,人の出入りや,物の移動がある空間での監視を視野に入れ,小さな物体が多く存在し,背景が複雑な研究室などの室内環境でも動作することを想定した.
カメラは部屋全体を見渡せる位置に設置した大域カメラと,人の移動を検知した領域を拡大撮影する局所カメラを用いる.両カメラは,位置姿勢を校正し,自立的に姿勢を制御する.
大域カメラにより,広域環境の人動作を認識する.
局所カメラは,パン・チルト制御することで姿勢を大域カメラが人動作を認識した領域に向け,対象領域を拡大撮影し,移動物体を認識する.
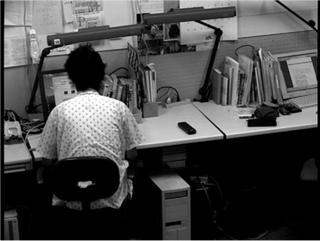
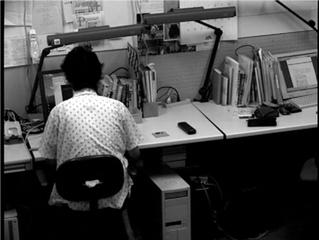
図1(a)は大域カメラによる撮影画像,(b)は局所カメラによる撮影画像である.なお,局所カメラは大域カメラにおける左上部分を拡大撮影している.
広い領域を監視するための方法として,高解像度のカメラを用いることが考えられるが,装置のコストに見合った,十分な性能を得られるとは限らない.一方で局所カメラの役割を持ったカメラのみを組み合わせ,監視領域をカバーする手法も想定されるが,設置台数の面から,コスト増加・システムの煩雑さによるメンテナンス利用しやすさの問題は避けられない.
本研究では,複数台のカメラを独立して動作させ,カメラに接続したコンピュータ間で通信することで,1つのシステムとして運用し,画像間の分散処理を可能にした.現在,大域カメラ1台に対し,同一座標を共有するカメラN台によるシステムを運用可能である.
| (a) Broad area
camera. |
(b) Local area
camera. |
| Fig.1 Two types
of camera view images. |
2.物体・人の認識
物体・人物領域の抽出には,映像から得た連続する2フレーム間で差分をとるフレーム間差分,背景フレームと映像から得たフレームで差分をとる背景差分を用いる.また,物体と人を離して認識するため,座標投票法を用いる.
人が物体を移動させるとき,物体移動の前後に“物体を持つ”,“目的の場所まで移動する”,“物体を置く”という一連の動作が行われる.この点に着目し,フレーム間差分により人の動きを認識,背景差分により人と物体の移動領域を検出する.
・人動作の検出
人動作の検出は,大域カメラが行う.人動作を含むフレームは,人領域において前後フレームと差異が生じる.そのため,フレーム間差分によって,差が生じた領域の面積の総和が一定値を超えて増加した場合,人動作開始イベント,減少した場合,人動作終了イベントとして検出する.
・物体移動領域の認識
大域カメラによって,人動作終了イベントが検出された領域において,直後は人領域が少ないと判断できる.そのため,この領域にカメラの姿勢を変え,局所カメラにより,フレームを背景差分用の入力画像として取得する.原理としては,このフレームと,あらかじめ取得しておいたま背景画像と背景差分を行うことで,物体を検出できる.しかし,実際には,フレームに含れるなノイズなどの影響はもちろんの事ながら,人領域が存在した場合,誤認識をすることとる.
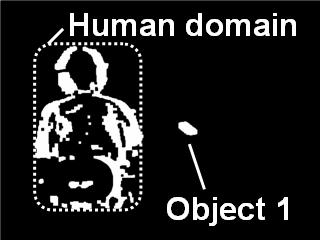
図2は,いすに座った人が右手側に2つの物体を順に移動させた様子である.(a)を背景フレームとし,
(b1),(b2)は人動作終了イベント検出時のフレーム,(c1),(c2)は(b1),(b2)の背景差分画像である.背景差分画像によって,物体Object
1,Object 2の移動を検出している.しかし,同時に人の微動も人領域Human
domainとして混在して検出している.
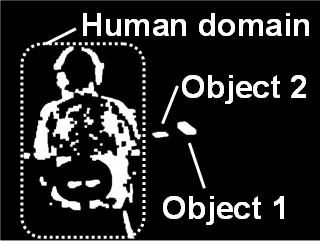
これを解決するために,座標投票法を用いる.座標投票法は,前述のフレーム画像により取得した画像から,物体領域と人領域を分離することを目的としている.そのために,フレーム複数枚用意することで,それらの比較を行う.複数枚のフレームにわたり,検出した人領を域干の移動や,形状の変化をすることに比べ,物体には,基本的に変化はないことを利用している.
先の状態の後,座標投票法のために,別の領域も含め,同様の人動作終了イベントが検出された領域について,フレーム取得を繰り返す.同一領域において,取得フレーム数が設定値(=投票値)を超えると,これらのフレームと,背景フレームと背景差分を行う.その後,座標投票を背景差分結果に対し,その中心座標に対して行う.連続で投票された領域を,物体領域として,認識する.
図2(c1)と(c2)を比較するとObject 1の差分領域は,時間が経過しても変化が見られない.しかし,人は,通常,完全に静止せず微小動作するため,背景差分の度にHuman
domainの位置や形状が変化する.この特性を利用し,差分領域の中心座標に投票をする操作を繰り返し,連続で同じ画像座標にN票投票された場合,その背景差分領域を物体の領域として判断している.
| Fig.2 Background difference and vote
method. |
|